Products Home
Products HomeUSB运动控制,19英寸机柜

- Up to 12 Drive Channels in a Single Chassis
- DC Servo Motor, Stepper Motor, Piezo, and Auto-Alignment Driver Module
- Ideal for Creating Multi-Axis Integrated Positioning Systems
MMR601
Full Suite of Software Support Tools Included






Please Wait
| Rack System Motion Controller Modules |
|---|
| 2-Channel Brushless DC Motor Controller Module |
| 2-Channel Stepper Motor Controller Module |
| 2-Channel Piezo Controller Module |
| 2-Channel NanoTrak® Auto-Alignment Module |
| USB Motion Control 19" Rack Chassis |
特性
- 四个双通道插件模块:
- 每个4U机柜有6个模块的空间
- USB即插即用
- 单台主机可控制多个机架
- 包含完整的Kinesis®软件控制套件
- 直观的软件图形控制面板
- 通用的ActiveX®编程接口
- 与其它APT™系列控制器完全软件集成(集成系统开发)
MMR601(602) 19英寸机架系统是为多维运动控制应用而特别设计的多通道多功能模块化架构。这个新型系统是复杂、完备、基础结构可扩展的精密运动控制平台。作为一个模块化系统,它可混合装载准确个数的所要求的控制器模块,包括无刷电机驱动(MBD)、步进电机驱动(MST)、压电驱动(MPZ)和Thorlabs强大的NanoTrak®自动对准技术(MNA)。它配置了相同的先进高速数字信号处理(DSP)技术和低噪声模拟电路,这些技术最初用于等效APT™台式运动控制器中。
模块化机架提供台式应用的有盖板版本(MMR602)、或者用于标准19英寸机柜安装的无盖板版本(MMR601),并以4U、19英寸机架外壳尺寸提供多功能12通道平台。
USB连接提供即插即用的计算机操作,可通过两种软件平台实现:新的Kinesis软件和旧版APT(先进定位技术)软件。Kinesis提供新的.NET控件,第三方人员可用最新版的C、C#、Visual Basic、LabVIEW™或任何兼容.NET的语言调用这些控件,用于开发自定义应用。用户也可在ActiveX®编程环境使用旧版APT软件(不兼容MBD602无刷DC电机控制器),快速设置复杂运动序列。例如,对于Thorlabs的所有平台和驱动器产品,所有相关工作参数都可以自动设置。关于两种软件包的详细信息,请看运动控制软件、Kinesis教程和APT教程标签。
这个机架系统可与任何台式控制器完美地组合使用,并通过同样统一的Kinesis或ATP软件界面来控制所有参数,使得对基于台式和机架的解决方案具有共同的学习曲线。
电缆
用于将驱动器或位移台连接到控制器的电缆是由驱动器或位移台提供的,而不是由控制器提供。如果需要帮您确定合适的替换电缆,请联系技术支持techsupport-cn@thorlabs.com。
运动控制19英寸机柜
| Item # | MMR601 & MMR602 |
|---|---|
| Enclosure | Standard 19" Rack, 4U High |
| Module Bays | 6 Modular Slots, Back Panel Access |
| Communications | USB 1.1 Interface |
| Power Input | |
| Voltage | 85-264 V AC |
| Frequency | 47-63 Hz |
| Power | 800 W |
| Fuse | 10 A |
| Dimensions (W x D x H) | 480 mm x 448 mm x 183 mm (19.0" X 17.6" X 7.0") |
| Weight | 16 kg (35.2 lbs) |
无刷DC电机控制器
| Item # | MBD602 |
|---|---|
| Number of Channels | 2 |
| Motor Drive Connector | 8-Pin DIN-Type, Female (Motor Phase Outputs, Stage ID Input) |
| Feedback Connector | 15-Pin D-Type, Female |
| Brushless Continuous Current Output | 2.5 A per Channel (5.0 A Max All-Channel Output) |
| Brushless Peak Current Output | 4.0 A per Channel (5.2 A Max All-Channel Output) |
| Pulse-Width Modulation Frequency | 20 kHz |
| Operating Modes | Position and Velocity |
| Control Algorithm | 16-Bit Digital PID Servo Loop with Velocity and Acceleration Feed Forward |
| Velocity Profile | Trapezoidal |
| Position Count | 32 Bit |
| Position Feedback | Incremental Encoder |
| Encoder Bandwidth | 2.5 MHz (10 M Counts/sec) |
| Encoder Supply | 5 V |
| AUX Control Connector | 26-Way High Density D-Type, Female (User Digital IO, 5 V O/P) |
| Input Power Requirements | Power: 250 VA Voltage: 100 to 240 V AC Frequency: 47 to 63 Hz |
| Dimensions | 187 mm x 286.6 mm x 50.4 mm (7.36" x 11.28" x 1.98") |
| Weight | 0.9 kg (1.98 lbs) |
| Compatible Motor Specs | 3-Phase DC Brushless Motors with Peak Power: 100 W, Coil Resistance: 0.1 to 100 Ω, Coil Inductance (Nominal): 1 to 100 mH, and Rated Phase Current (Nominal): 100 mA to 5 A |
步进电机控制器
| Item # | MST602 |
|---|---|
| Number of Channels | 2 |
| Motor Drive Connector | 15-Pin D-Type, Female 2-Phase Bi-Polar Motor Drive Output Differential Quadrature Encoder (QEP) Input Forward, Reverse Limit Switch Inputs Encoder 5 V (with Ground) |
| Motor Control Connector | 15-Pin D-Type, Female Jog Forward/Back Input (TTL) Enable/Disable Interlock (per Channel) Connect to Return to Operate Motor User 5 V (with Ground) 100 mA Max |
| User I/O Connector | 26-Pin D-Type, Female 4 Logic Inputs (TTL) 4 Logic Outputs (Open Collector) Trigger Input (TTL) Trigger Output (Open Collector) 2 Analog Inputs, Single Ended 0-10 V (12 Bit) |
| Resolution | 2048 Microsteps per Full Step 200 Step Motor - 409,600 Microsteps per Rev 24 Step Motor - 49,152 Microsteps/Rev |
| Motor Drive Voltage | Up to 48 V |
| Motor Drive Power | Up to 50 Wpeak/25 Wavg |
| Motor Speeds | Up to 3000 RPM (for 200 Full Step Motor) |
| Encoder Feedback Bandwidth | 500 kHz |
| Compatible Motor Specs | 2-Phase Bi-Polar Stepper Motors with Peak Powers: 5 to 50 W, Average Power: 25 W Maximum Step Angle Range: 20° to 1.8° Coil Resistance (Nominal): 4 to 15 Ω, Coil Inductance (Nominal): 4 to 15 mH Rated Phase Current (Nominal): 100 mA to 1 A |
| Housing | Single APT™ Rack System Bay |
| Dimensions (W x D x H) | 190 mm x 270 mm x 50 mm (7.5" x 10.6" x 2.0") |
| Weight | 1.5 kg (3.3 lbs) |
压电控制器
| Item # | MPZ601 |
|---|---|
| Number of Channels | 2 |
| Piezoelectric Output (SMC Male) - Per Channel | |
| Voltage (Software Control) | 0 to 75 V DC |
| Voltage (External Input) | -10 to 90 V DC |
| Current | 500 mA Max Continuous |
| Stability | 100 ppm Over 24 hours (After 30 mins Warm-Up Time) |
| Noise | < 3 mV RMS |
| Typical Piezo Capacitance | 1 to 10 µF |
| Bandwidth | 10 kHz (1 µF Load, 1 Vp-p) |
| Position Feedback (9-Pin D-Type Female) - Per Channel | |
| Feedback Type | AC Bridge or 0-10 V Differential DC (SW Selectable) |
| AC Feedback Transducer Type | Strain Gauge |
| AC Detection Method | AC Bridge (18 kHz Excitation) |
| Typical AC Feedback Resolution | 5 nm (for 20 µm Actuator e.g. PAZ005) |
| Auto-Configure | Identification Resistance in Actuator |
| User Input/Output (26-Pin D-Type Female) | |
| Potentiometer Input (Per Channel) | Reference + Wiper (50 kΩ 10 Turn Pots) |
| HV Output Monitor (Per Channel) | 0 to 10 V DC |
| 4 Digital Inputs | TTL Levels |
| 4 Digital Outputs | Open Collector |
| Trigger Input/Output | TTL |
| Trigger Input Functionality | Triggered Voltage Ramps/Waveforms |
| Trigger Output Functionality | Trigger Generation During Voltage Ramp Output |
| User 5 V (with Ground) 250 mA Max | |
| General | |
| Housing | Single APT™ Rack System Bay |
| Dimensions (W x D x H) | 190 mm x 270 mm x 50 mm (7.5" x 10.6" x 2.0") |
| Weight | 1.5 kg (3.3 lbs) |
NanoTrak®主动主动对准模块
| Item # | MNA601/IR | |
|---|---|---|
| Number of Channels | 2 | |
| Signal Measurement | ||
| PIN Photodiode | ||
| Mechanical Connector | SMB Male | |
| Photocurrent Range | 1 nA to 10 mA | |
| Optical Connector | FC/PC | |
| NanoTraking | ||
| Circle Scanning Frequency | 1 to 300 Hz | |
| Circle Position Range | < 1% to >99% MPE | |
| Circle Diameter Adj. Modes | Automatic and Manual | |
| Signal Phase Compensation | ±180° | |
| Piezoelectric Input/Output | ||
| Number of Piezo Channels | 2 | |
| HV Output Connectors | ||
| Connector Type | SMC Male | |
| Voltage Output | 0 to 75 VDC/Channel | |
| Voltage Stability | 100 ppm over 24 Hours | |
| Noise | < 3 mV (RMS) | |
| Output Current | 500 mA/Channel | |
| Analog Output Monitors | ||
| Connector Type | BNC | |
| Voltage Range | 0 to 10 VDC | |
| Strain Gauge Position Feedback | ||
| Connector Type | 9-Pin D-Type Female | |
| Feedback Type | AC | |
| Other Input/Output | ||
| Optical Power Monitor | ||
| Connector Type | BNC | |
| Voltage Range | 0 to 10 VDC | |
| Ext Signal In Input | ||
| Connector Type | BNC | |
| Voltage Range | 0 to 10 VDC | |
| User Control | ||
| Connector Type | 26-Pin HD D-Type Female | |
| Isolated Digital Inputs | 4 off TTL | |
| Isolated Digital Outputs | 4 off TTL | |
| Trigger Input | 1 off TTL | |
| Trigger Output | 1 off TTL | |
| Potentiometer Channel Ctrl Input | 1-10 k (Each Channel) | |
| Analog Channel Output Monitors | 0 to 10 VDC (Each Channel) | |
| General | ||
| Dimensions (W x D x H) | 190 mm x 270 mm x 50 mm (7.5" x 10.6" x 2.0") | |
| Weight | 1.5 kg (3.3 lbs) | |
| Optical Detector Specifications for MNA601/IR | ||
|---|---|---|
| Item # | NTA009 (Sold Separately) | NTA007 (Included with Controller) |
| Detector Type | Si | InGaAs |
| Operating Wavelength | 320 - 1000 nm | 900 - 1700 nm |
| Active Area | Ø0.8 mm | Ø0.12 mm |
| Fiber Input | FC/PC | |
| Rise Time | 100 ps @ 12 V | |
| NEP | 1.5 x 10-15 W/√Hz | 4.5 x 10-15 W/√Hz |
| Dark Current | 0.01 nA (Typ.) @ 10 V | 0.05 nA (Typ.) @ 5 V |
| Junction Capacitance | 3.00 pF (Typ.) @ 10 V | 2.0 pF (Typ.) @ 5 V |
控制模块引脚图
MBD602无刷直流电机控制器模块
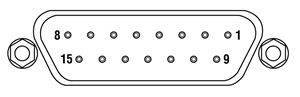
电机驱动
8引脚DIN-Type,母头
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Motor Phase B | 5 | Stage ID |
| 2 | GND | 6 | Enable |
| 3a | Motor Phase D | 7 | Motor Phase C |
| 4 | Motor Phase A | 8a | +5 V |
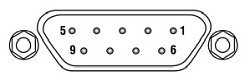
反馈
15引脚D-Type,母头
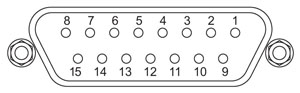
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Connected | 9 | GND |
| 2 | GND | 10 | Limit Switch + |
| 3 | Not Connected | 11 | Limit Switch - |
| 4 | Index - | 12 | Index + |
| 5 | QB - | 13 | QB + |
| 6 | QA - | 14 | QA + |
| 7a | 5 V | 15 | Not Connected |
| 8a | 5 V |
手持
迷你DIN母头
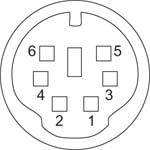
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | RX (Controller Input) | 4b | Supply Voltage for Handset 5 V |
| 2a | Ground | 5 | TX (Controller Output) |
| 3a | Ground | 6a | Ground |
AUX I/O
26路高密度D-Type,母头
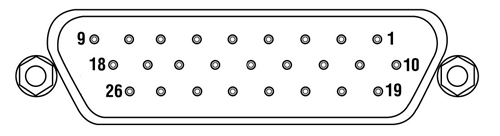
| Pin | Description | Function | Pin | Description | Function | Pin | Description | Function |
|---|---|---|---|---|---|---|---|---|
| 1a | Digital I/P 3 | - | 10a | Digital O/P 3 | - | 19c | Ground | - |
| 2a | Digital I/P 2 | - | 11a | Digital O/P 2 | - | 20e | Digital O/P 2+ | Motor #1 Encoder B+ |
| 3a | Digital I/P 1 | - | 12a | Digital O/P 1 | - | 21e | Digital O/P 2- | Motor #1 Encoder B- |
| 4a | Digital I/P 0 | - | 13a | Digital O/P 0 | - | 22e | Ground | - |
| 5e | Digital O/P 6- | Motor #2 Encoder A- | 14e | Digital O/P 4+ | Motor #2 Encoder IX+ | 23d | 5 V | - |
| 6e | Digital O/P 6+ | Motor #2 Encoder A+ | 15e | Digital O/P 4- | Motor #2 Encoder IX- | 24e | Digital O/P 1+ | Motor #1 Encoder IX+ |
| 7e | Digital O/P 5+ | Motor #2 Encoder B+ | 16e | Digital O/P 3- | Motor #1 Encoder A- | 25e | Digital O/P 1- | Motor #1 Encoder IX- |
| 8e | Digital O/P 5- | Motor #2 Encoder B- | 17e | Digital O/P 3+ | Motor #1 Encoder A+ | 26c | Ground | - |
| 9b | RS-232 RX | - | 18b | RS-232 TX | - |
MST602步进电机控制器模块
电机I/O控制器
D-Type母头
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | User 5 V I/O | 9 | 6 | Channel 2 Emergency Stop Daisy Chain Link Returnb | 14 | 11 | Channel 2 Jog Backwardsa | 9 |
| 2 | Channel 1 Jog Forwardsa | 9 | 7 | Channel 2 Enable Returnb | 15 | 12 | Channel 1 Emergency Stop Daisy Chain Linkb | 4 |
| 3 | Channel 2 Jog Forwardsa | 9 | 8 | Not Used | - | 13 | Channel 1 Enableb | 5 |
| 4 | Channel 1 Emergency Stop Daisy Chain Link Returnb | 12 | 9 | User 0 V | - | 14 | Channel 2 Emergency Stop Daisy Chain Linkb | 6 |
| 5 | Channel 1 Enable Returnb | 13 | 10 | Channel 1 Jog Backwardsa | 9 | 15 | Channel 2 Enableb | 7 |
用户I/O控制器
D-Type母头
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | Digital I/P 1 | 19 | 10 | Digital O/P 1 | 19 | 19 | Digital Ground 1 (0 V)c | - |
| 2 | Digital I/P 2 | 19 | 11 | Digital O/P 2 | 19 | 20 | Ext Trigger I/P | 22 |
| 3 | Digital I/P 3 | 19 | 12 | Digital O/P 3 | 19 | 21 | Ext Trigger O/P | 22 |
| 4 | Digital I/P 4 | 19 | 13 | Digital O/P 4 | 19 | 22 | Digital Ground 2 (0 V)c | - |
| 5 | Channel 1 RS232 TX | - | 14 | Channel 2 RS232 TX | - | 23 | 5 V User O/P (50 mA Max.) | - |
| 6 | Channel 1 RS232 RX | - | 15 | Channel 2 RS232 RX | - | 24 | Reserved for Future Use | - |
| 7 | Not Used | - | 16 | Reserved for Future Use | - | 25 | Reserved for Future Use | - |
| 8 | Channel 2 Analog I/P (+)b | 17 | 17 | 0 V (Analog Rtn)b | 8 | 26 | Analoga Ground (0 V)c | - |
| 9 | Channel 1 Analog I/P (+)b | 18 | 18 | 0 V (Analog Rtn)b | 9 |
驱动通道控制器
D-Type母头
| Pin | Description | Pin | Description | Pin | Description |
|---|---|---|---|---|---|
| 1 | Encoder A +ve | 6 | Not Used | 11 | 0 V User |
| 2 | Encoder A -ve | 7 | Phase B - | 12 | Reserved for Future Use |
| 3 | Encoder B +ve | 8 | Phase A - | 13 | Reserved for Future Use |
| 4 | Encoder B -ve | 9 | CW Limit Switch | 14 | Phase B + |
| 5 | 5 V User | 10 | CCW Limit Switch | 15 | Phase A + |
手持
迷你DIN母头
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | RX (Controller Input)/RS232 | 4 | Supply Voltage for Handset 5 V |
| 2 | Ground | 5 | TX (Controller Output) |
| 3 | Ground | 6 | Ground |
MPZ601压电控制器模块
用户I/O控制器
D-Type母头
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | DIG I/P 1a | 19 | 10 | DIG O/P 1a | 19 | 19 | Isolated Groundb | - |
| 2 | DIG I/P 2a | 19 | 11 | DIG O/P 2a | 19 | 20 | Ext Trigger I/P | 22 |
| 3 | DIG I/P 3a | 19 | 12 | DIG O/P 3a | 19 | 21 | Ext Trigger O/P | 22 |
| 4 | DIG I/P 4a | 19 | 13 | DIG O/P 4a | 19 | 22 | Ground | - |
| 5 | Channel 1 RS485 (+) | - | 14 | Channel 2 RS485 (+) | - | 23 | 5 V User O/P (Isolated) | - |
| 6 | Channel 1 RS485 (-) | - | 15 | Channel 2 RS485 (+) | - | 24 | Not Used | - |
| 7 | Not Used | - | 16 | Not Used | - | 25 | Analog or Potentiometer Ground | - |
| 8 | Channel 2 10 V O/Pc | 25 | 17 | Potentiometer Wiper Ch 2 | - | 26 | Potentiometer Reference | 25 |
| 9 | Channel 1 10 V O/Pc | 25 | 18 | Potentiometer Wiper Ch 2 | - |
压电控制器
D-Type母头
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | Wheatstone Bridge Excitation | 4 or 6 | 4 | DC(+) or Equipment Groundc | - | 7 | DC(-) or Actuator ID Signalb,c | 4 or 6 |
| 2 | +15 Va | 4 or 6 | 5 | Feedback Signal In | 4 or 6 | 8 | RS485 (-) | 9 |
| 3 | -15 Va | 4 or 6 | 6 | Equiptment Ground | - | 9 | RS485 (+) | 8 |
Ext In (+)和Ext In (-)
BNC母头
微分输入。HV放大器电路的输出可通过这两个输入的微分信号设为部分受控制的。如果输入源被设为i包含一个BNC选项,这个单元用这个微分信号与选择的任何其它输入源进行求和(电压设置使用GUI面板'Output'控制按钮和来自外部电位计的电压)。
HV Out
SMC

0 - 75 V、0 - 250 mA。为压电驱动器提供驱动信号。
MNA601/IR NanoTrak®主动自动对准模块
用户I/O控制器
D-Type母头
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | DIG I/P 1a | 19 | 10 | DIG O/P 1a | 19 | 19 | Isolated Groundb | - |
| 2 | DIG I/P 2a | 19 | 11 | DIG O/P 2a | 19 | 20 | Ext Trigger I/P | 22 |
| 3 | DIG I/P 3a | 19 | 12 | DIG O/P 3a | 19 | 21 | Ext Trigger O/P | 22 |
| 4 | DIG I/P 4a | 19 | 13 | DIG O/P 4a | 19 | 22 | Ground | - |
| 5 | Channel 1 RS485 (+) | - | 14 | Channel 2 RS485 (+) | - | 23 | 5 V User O/P (Isolated) | - |
| 6 | Channel 1 RS485 (-) | - | 15 | Channel 2 RS485 (+) | - | 24 | Not Used | - |
| 7 | Not Used | - | 16 | Not Used | - | 25 | Analog Ground | - |
| 8 | Channel 2 10 V O/Pc | 25 | 17 | External Analog I/P CH2 0 - 10 V | 25 | 26 | Signal Power Outd | 25 |
| 9 | Channel 1 10 V O/Pc | 25 | 18 | External Analog I/P CH1 0 - 10 V | 25 |
压电控制器
D-Type母头
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | Wheatstone Bridge Excitation | 4 or 6 | 4 | DC(+) or Equipment Grounda | - | 7 | DC(-) or Actuator ID Signala,b | 4 or 6 |
| 2 | +15 Vc | 4 or 6 | 5 | Feedback Signal In | 4 or 6 | 8 | RS485 (-) | 9 |
| 3 | -15 Vc | 4 or 6 | 6 | Equiptment Ground | - | 9 | RS485 (+) | 8 |
LV Out
BNC母头
0到+10 V。这个输出是HV OUT的映射,10 V等效于HV输出的75 V,可用于连接示波器,从而监控压电驱动器的驱动信号。
HV Out
SMC
0 - 75 V、0 - 500 mA。为压电驱动器提供驱动信号。
信号输入
BNC母头
0 - 10 V、100 kΩ负载。用于从外部功率计接收光探头的信号。
压电驱动器带宽教程
在多徐高速应用中,了解压电驱动器改变长度的速率非常重要。如果已知下面的参数,则可以计算出压电控制器和压电堆栈的带宽:
- 控制器可产生的最大电流。BPC系列压电控制器(下方示例中所用型号)为0.5A。
- 压电器件的负载电容。负载电容越高,系统越慢。
- 所需信号大小(V),决定了压电器件可延伸的长度。
- 驱动器绝对最大带宽,与所驱动的负载无关。
为了驱动输出电容,需要电流对其进行充放电。电荷的微分,dV/dt,称为转换速率。电容越大,所需要的电流就越大:
例如,如果用最大电流为0.5 A的BPC系列压电控制器驱动一个电容为20 µF的100 µm压电堆栈,转换速率为:

因此,瞬态电压从0V变为75V,输出电压达到75 V需要3 ms。
注意:对于这些计算,我们假设驱动器的绝对最大带宽比计算的带宽要大的多,因此驱动器带宽并不是限制因素。还请注意这些计算只适用于开环系统。在闭环模式下,反馈回路的响应慢,是限制带宽另一因素。
正弦信号

系统带宽通常指系统对给定振幅的正弦信号的反馈。对于由幅值A、峰-峰电压Vpp和频率f 的正弦信号驱动的压电元件,我们有:

右图为电压随时间变化的关系曲线。在右图点a处,t = 2nπ,(n=0, 1, 2,...)时达到最大转换速率或者电压变化:
由上面第一个公式可推得:

因此,
对于上面的示例,最大全范围(75V)带宽为
 .
.
对于电容比上面小10倍的压电堆栈,结果可能要好10倍,或者约为1060 Hz。如果100 µm压电堆栈的峰-峰信号缩小至7.5V(最大幅值的10%),结果则再次比原来好10倍(1060 Hz处)。

三角波信号
如果由一个最大电压为Vpeak、最小电压为0的三角波信号驱动压电促动器,转换速率与斜率相等:
![]() .
.
由于f = 1/T:


矩形波信号
如果由一个最大电压为Vpeak、最小电压为0的矩形波信号驱动压电促动器,转换速率限制了最小上升和下降时间。这种情况下,信号上升或下降时转换速率等于斜率。如果tr为最小上升时间,则
或者
 .
.
更多有关压电理论与工作的信息,请查看压电教程页面。
Thorlabs提供两个平台来驱动我们的一系列运动控制器:我们的Kinesis®软件包或原有的APT™(先进定位技术)软件包。这两款软件包都可用于控制Kinesis系列装置,包括了多种运动控制器,涵盖的范围从小型、低功率、单通道驱动器(比如K-Cubes™和T-Cubes™)到高功率、多通道、模块化的19英寸机架式纳米定位系统(APT机架系统)。
Kinesis软件具有.NET控件,使得第三方开发者可在最新的C#、Visual Basic、LabVIEW™或任何兼容.NET语言的环境下开发自定义应用。对于不希望使用.NET框架的应用,此软件也包含低级别的DLL库。中央序列管理器支持整合和同步所有Thorlabs的运动控制硬件。
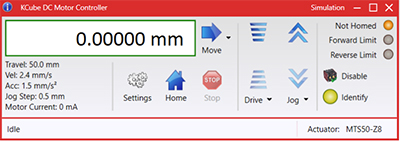
Kinesis GUI屏幕
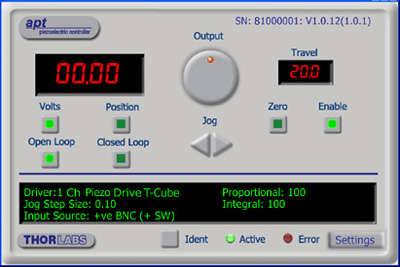
APT GUI屏幕
我们原有的APT系统软件平台提供基于ActiveX的控制,使得第三方开发者可在C#、Visual Basic、LabVIEW™或任何兼容Active-X语言的环境下开发自定义应用,并且包含一个模拟器模式,以帮助在没有硬件的情况下开发自定义应用。
通过提供这些常用软件平台,Thorlabs确保用户可在一个应用中轻松混合和匹配任何Kinesis和APT控制器,同时只需学习一组软件工具。这样可以完美地将任何控制器与单轴或多轴系统相结合,并通过单个基于PC的统一软件界面控制全部装置。
此软件包有两种用法:图形用户界面(GUI)实用工具,用于与“开箱即用”控制器直接交互和控制;以及一组编程界面,可用所选的开发语言对自定义集成的定位和对准解决方案进行轻松编程。
我们提供一系列视频教程来帮助说明我们的APT系统软件。这些教程提供软件的概况和APT配置实用工具。此外,还提供一个视频教程以说明如何在软件内选择模拟器模式,以便用户在没有连接控制器的情况下进行软件实验。请选择上方APT教程标签来查看这些视频。
软件
Kinesis版本 1.14.49
Kinesis软件包含GUI,用于控制Thorlabs的Kinesis和APT™系统控制器。
还包含:
- 通信协议
软件
APT版本 3.21.6
APT软件包含GUI,用于控制Thorlabs的APT™和Kinesis系统控制器。
还包含:
- 通信协议
Thorlabs的Kinesis®软件包含全新的.Net控件,使用最新的C#、Visual Basic、LabVIEW™或其他任何兼容.NET语言的第三方开发者都可用其创建自定义应用。
C#
这种编程语言可以使用多种编程模式或语言,因而可以轻松而高效地解决复杂的问题。它包含类型、命令式编程、申诉式编程、函数式编程、泛型编程、面向对象的编程和面向组件的编程。通过给这个常用的软件平台添加这个功能,Thorlabs确保用户只需学习一套软件工具,就可以在单个应用中轻松融入或匹配任何Kinesis控制器。这样,就可以将从低功率单轴系统到高功率多轴系统的任意控制器结合,并通过一个PC的统一软件界面控制一切。
Kinesis系统软件有两种用法:图形用户界面(GUI)工具,用于直接交互并控制“开箱即用”的控制器;还有一套编程界面,可用选择的开发语言轻松将自定义集成的定位和对准方案进行编程。
如需了解开发者使用不同方式建立Kinesis运动控制库时编译和运行的示例项目集,请点击下面的链接。请注意,需要单独的集成开发环境(IDE)(比如Microsoft Visual Studio)执行Quick Start实例。C#示例项目通过Kinesis软件包中附带的.NET控件执行(详情请看Kinesis软件标签)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
使用LabVIEW通过.Net控件可以与任意基于Kinesis或APT的控制器通信。在LabVIEW中,创建的用户界面,也就是前面板,包含一套工具和对象,然后添加代码,利用函数图形控制前面板的上的对象。下面提供了LabVIEW教程,给出了在LabVIEW中给Kinesis和APT驱动的装置使用.Net控件创建控制GUI的相关信息。它包含一个概述,里面有在LabVIEW里使用控制器的基本信息,并解释了使用LabVIEW GUI操作装置前需要完成的安装步骤。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
此处提供的APT视频教程主要分为两组 - 第一组关于使用附带的APT实用程序,第二组关于通过不同的编程环境对APT系统进行编程。
免责声明:以下视频最初在Adobe Flash中制作。2020年后随着Flash停用,这些教程被重新录制以在将来使用。Flash Player控件仍显示在每个视频的底部,但它们不起作用。
每个APT控制软件都附带实用程序APTUser和APTConfig。APTUser提供一种使用直观图形控制面板与APT控制硬件进行交互的快速简便方法。APTConfig是一个“离线”实用程序,其支持各种系统范围内的设置,例如预先选择机械位移台类型并将它们与特定的运动控制器关联。
APT User实用程序
下方第一个视频概述了APTUser实用程序的使用。在没有控制PC的情况下,OptoDriver单通道控制器产品可以通过其前面板控件进行操作。使用APTUser实用程序可更改与这些前面板控件的操作有关的存储设置。第二个视频说明了此过程。
APT Config实用程序
通过APT Config实用程序可实现各种APT系统范围内的设置,包括设置模拟硬件配置,以及关联机械位移台和特定的电机驱动通道。第一个视频简要介绍了APT Config应用程序。接下来的两个视频提供了有关创建模拟硬件配置和进行位移台关联的更多详细信息。
APT编程
APT软件系统是一个ActiveX控件的集合。ActiveX控件是与语言无关的软件模块,可提供图形用户界面和编程界面。每种类型的硬件装置都有一个ActiveX控件类型,例如电机ActiveX控件涵盖了任何类型APT电机控制器(直流或步进)的操作。许多Windows软件开发环境和语言直接支持ActiveX控件,并且一旦将这种控件嵌入到自定义应用程序中,它所包含的所有功能就可以立即用于应用程序以进行自动化操作。以下视频说明了将APT ActiveX控件与LabVIEW、Visual Basic和Visual C ++结合使用的基本知识。请注意,许多其他语言也都支持ActiveX,包括LabWindows CVI、C ++ Builder、VB.NET、C#.NET、Office VBA、Matlab、HPVEE等。尽管这些语言环境并未在本教程视频中特别介绍,但显示出的许多想法仍与使用这些其他语言有关。
Visual Basic
第1部分说明如何在Visual Basic中运行APT ActiveX控件,第2部分继续介绍如何对自定义定位序列进行编程。
LabVIEW
LabVIEW提供全主动支持,下面的系列视频教程说明了创建自定义APT运动控制序列的基本构建块。我们首先展示了如何在软件开发过程中调用Thorlabs提供的在线帮助。第2部分说明了如何创建APT ActiveX控件。ActiveX控件同时提供方法(即函数)和属性(即值设置)。第3部分和第4部分显示了如何创建和连接ActiveX控件提供的方法和属性。最后,第5部分中,我们将所有内容放在一起,并显示了一个完整的LabVIEW示例程序,此程序演示了一个自定义移动序列。
获取在线帮助
创建ActiveX控件
创建ActiveX方法
创建ActiveX属性
如何启用ActiveX控件
以下教程视频说明了创建方法和属性节点的替代方法:
创建ActiveX方法 (可选择的)
创建ActiveX属性 (可选择的)
Visual C++
第1部分说明如何在Visual C ++中运行APT ActiveX控件,第2部分继续介绍如何对自定义定位序列进行编程。
MATLAB
将MATLAB和ActiveX控件与Thorlabs APT定位器一起使用时,若需帮助,请点击这里。
为进一步帮助程序员,这里还提供在LabVIEW中对APT软件进行编程的指南。
| Posted Comments: | |
| No Comments Posted |

 放大
放大- 安装最多6个控制模块(在下面单独出售)
- 用于自定义应用的多功能联合控制
- 4U、19英寸外形,可安装在标准19英寸机柜内
模块化机架式机箱提供用于安装在19英寸机柜中的无盖板版本(MMR601)以及用于台式应用的有盖板版本(MMR602)。对于四种兼容的控制器模块(下面单独出售),它能安装最多六个模块,从而在4U、19英寸机架外壳内提供最多12个通道的运动控制。

 放大
放大- 双通道控制器,用于驱动三相无刷直流无刷电机产品(最大100 W峰值)
- 通过MMR601或MMR602外壳的USB和AUX I/O端口提供通信和即插即用工作
- 用于闭环速度和位置控制的增量编码反馈
- 电机控制I/O端口(点动,互锁)
- 受Kinesis软件控制包支持
- Kinesis软件支持的新特性:
- 快速位置输入/输出触发
- 同步运动
- 动态PID设置
MBD602控制器模块是一款双通道、高分辨率、无刷直流电机驱动器,特别设计用于非常灵活的MMR601或MMR602运动控制19英寸模块化机架系统。它能驱动Thorlabs各种最高100 W的三相无刷直流伺服电机,不管有没有编码器反馈。使用我们健壮的Kinesis软件包,快速输入和输出触发使其成为复杂控制系统的通用搭建模块,使系统能通过自定义设置满足各种应用需要。请注意,MBD602控制器不兼容我们旧版的APT™软件。
最多六个MBD602模块可安装在上面销售的模块化机架系统中,为多轴运动控制应用提供可扩展的运动控制方案。用在MMR601或MMR602机架外壳中时,多个模块可通过标准的USB集线器技术连接在一个PC上,以此实现多轴运动控制应用。将其配合用户友好的Kinesis软件,用户可在很短时间内上手使用。比如,Thorlabs位移台/压电驱动器产品的所有相关工作参数都可以自动设置。使用丰富的.NET编程环境还能用于先进的自定义运动控制应用和运动序列,详细描述请见Kinesis教程标签。
触发能力
MBD602控制器具有强大的输入和输出位置触发能力。通过低于102 µs的等待时间,发送实时位置触发的间隔由用户设定,所以用户能为实时数据收集和反馈设置接近编码器水平的触发点(低至100 - 200 nm)。位置触发引擎在扫描时发送数千个脉冲,为用户提供一个多功能平台,以高度定制化图像测绘满足各种应用需求。作为一个示例,为了对5 mm x 5 mm样品成像,用户可设定样品边缘,然后使系统在样品上逐行扫描,以需要的任意间隔采集图像。通过使触发间隔匹配系统的视场,这些图像可通过数字方式组合在一起,以此为整个样品重构一个高倍率视图。
摇杆控制器
我们提供选配的两轴摇杆控制器(型号MJC2),可用于直观地手动控制位移台。关于摇杆控制器的详细信息,请点击下方的红色文档按钮(![]() )查看手册。
)查看手册。
电缆
连接控制器和驱动器或位移台的电缆包含在驱动器或位移台中,而不是包含在控制器中。如果需要帮您确定合适的替换电缆,请联系技术支持techsupport-cn@thorlabs.com。

 放大
放大- 双通道步进电机驱动
- 高分辨率微步进控制(适用于精细定位应用)
- 稳定高重复性低速工作(使用速度敏感型应用)
- 支持峰值达48 V / 50 W的二相双极步进电机
- 差分编码器反馈(QEP输入)提供闭环定位
- 多轴扩展USB即插即用
- 电机控制I/O端口(连续进动,互锁)
- 丰富的ActiveX®编程接口
- 可与其他APT™系列控制器完全软件集成(集成系统开发)
- 兼容Kinesis软件控制套件
APT™ MST602模块是一款双通道、高分辨率、机架安装式步进电机驱动器,为配合使用APT MMR601或MMR602运动控制19英寸模块化机架系统而设计。它能驱动高达50 W的二相双极步进电机,支持有/无编码器反馈,兼容Thorlabs各种装备步进电机的纳米定位驱动器和平台。此外,它还兼容各种不同功率不同步进尺寸的任何通用两相双极电机。
在于MMR601或MMR602机架外壳一起使用时,这个装置可通过USB连接并和PC联用。最多6个模块可安装在其中一种机架外壳,并通过标准USB集线器技术连接一个PC,以此实现多轴运动控制应用。加上用户友好的APT软件,用户可在很短时间内上手使用。比如,Thorlabs位移台/压电驱动器产品的所有相关工作参数都可以自动设置。使用扩展的ActiveX®编程环境还能用于先进的自定义运动控制应用和运动序列,详细描述请见运动控制软件与APT教程标签。
可选配的2轴摇杆控制台(MJC2)用于手动控制位移台。更多关于摇杆控制台的信息,请点击下方的红色文档按钮(![]() )查看手册。
)查看手册。
电缆
用于将驱动器或位移台连接到控制器的电缆是由驱动器或位移台提供的,而不是由控制器提供。如果需要帮您确定合适的替换电缆,请联系技术支持techsupport-cn@thorlabs.com。

 放大
放大- 两个压电驱动通道
- 无噪声高分辨率位置控制(适用于高精细定位应用)
- 电压斜升和波形生成能力(适用于扫描应用)
- 高带宽(10kHz)压电定位
- 对Thorlabs识别压电驱动器进行自动配置
- 用户控制数字和模拟I/O端口
- 丰富的ActiveX®编程接口
- 可与其他APT™系列控制器完全软件集成(集成系统开发)
- 兼容Kinesis软件控制套件
APT™ MPZ601压电驱动模块是一种双通道高功率(75 V,500 mA)压电控制器。它设计用于驱动Thorlabs各种开环和闭环压电控制纳米定位驱动器和平台。每个通道配备应变计反馈电路,在与Thorlabs驱动器联合使用时,这个装置具有纳米级的闭环定位精度。另外,灵活的软件设置使这些设备有很多的配置,因此适合驱动第三方产品中的各种压电元件。波形产生能力和触发输出使得其满足压电扫描的应用需求。
这个模块集成了最新的高速数字信号处理(DSP)和低噪声模拟电子技术,专为满足高度灵活的APT MMR601或MMR602运动控制19英寸模块化机架系统所设计。可在这个机架系统上安装多个MPZ601压电模块(每个机架提供最多12通道运行),以支持需要纳米级移动控制和多维的更大规模的关键对准应用。
通过MMR601或MMR602机架外壳的USB连接能提供简单的PC操作 - 单台计算机可以通过标准的USB集线器技术连接多个模块以构建多轴运动控制系统。友好的APT™软件用户界面可以方便用户在很短时间内上手使用,所有的Thorlabs压电驱动器的工作参数都可以自动设置。加上用户友好的APT软件,用户可在很短时间内上手使用。比如,Thorlabs位移台/压电驱动器产品的所有相关工作参数都可以自动设置。使用扩展的ActiveX®编程环境还能用于先进的自定义运动控制应用和运动序列,详细描述请见运动控制软件与APT教程标签。
电缆
用于将驱动器或位移台连接到控制器的电缆是由驱动器或位移台提供的,而不是由控制器提供。如果需要帮您确定合适的替换电缆,请联系技术支持techsupport-cn@thorlabs.com。

 放大
放大 Click to Enlarge
Click to EnlargeNTA007红外探测器,后视图
- 主动对准系统,具有先进的光搜索算法
- 跟踪功能保持无限最佳的性能
- 锁定模式维持对准稳定性
- MNA601/IR模块提供两轴控制
- 两个压电驱动输出通道提供闭环反馈
- 包含红外(InGaAs)探测器(型号NTA007)和用于外部二极管的SMB接头
- 可见(硅)探测器(型号NTA009)单独提供
- 完整的软件GUI控制套件并支持第三方自定义应用程序
模块化NanoTrak自动对准控制器能够实现光纤-光纤或光纤-自由空间系统的最大耦合功率通量。控制器通过操作压电驱动位移台以圆形扫描模式移动光纤末端,执行功率梯度搜索,以确定峰值功率方向并定位光纤,从而实现最大通量。两个高电压输出通道提供驱动相关压电驱动器的信号,因此无需外部压电驱动器。光纤对准控制器结合3轴NanoMax和6轴NanoMax等多轴压电驱动位移台,可以构成完整的自动对准系统。
在与MMR601或MMR602机架系统一起使用时,USB连接和Kinesis®软件包提供简单的即插即用的计算机控制操作。这个软件包具有新的.NET控件,使最新的C、C#、LabVIEW™或任意兼容.NET语言的第三方开发人员能创建自定义应用程序。更多详情,请看运动控制软件、Kinesis教程和APT教程标签。
光最初从一个设备(比如光纤)耦合到另一个设备时包括在探测到信号之前搜索多维空间的过程。NanoTrak支持软件提供一系列电机搜索算法,以实现初次光探测。虽然NanoTrak主要用于对准光纤和集成光学器件,但也非常适合自动化任何劳动力密集型对准任务,如波导表征、给有源和无源器件配尾纤以及其他研发应用。
电缆
用于将驱动器或位移台连接到控制器的电缆是由驱动器或位移台提供的,而不是由控制器提供。如果需要帮您确定合适的替换电缆,请联系技术支持techsupport-cn@thorlabs.com。
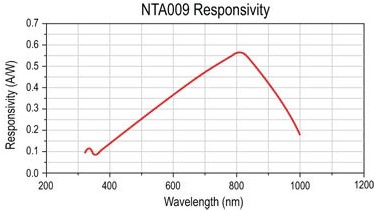
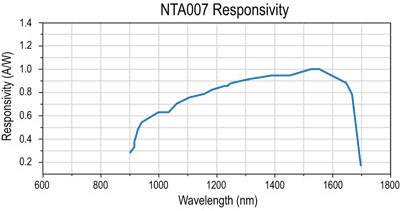
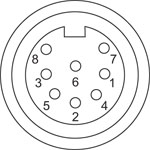
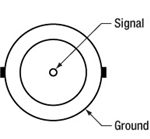
探测器
NanoTrak模块带有用于红外波段(900 - 1700 nm)的InGaAs探测器(NTA007)和用于外部探测头的PIN二极管SMB输入。用于可见波段(320 - 1100 nm)的硅探测器(NTA009)在下方单独出售。两种探测器都有FC/PC光纤输入,并通过探测器背面的插口连接控制器,详见右上图。两种探测器的规格和波长响应度请看表格和下面的曲线图。
| Item # | Wavelength Range | Active Area | Fiber Input | Dark Current | Junction Capacitance |
|---|---|---|---|---|---|
| NTA009 | 320 - 1000 nm | Ø0.8 mm | FC/PC | 0.01 nA (Typ.) @ 10 V | 3.00 pF (Typ.) @ 10 V |
| NTA007 | 900 - 1700 nm | Ø0.12 mm | FC/PC | 0.05 nA (Typ.) @ 5 V | 2.0 pF (Typ.) @ 5 V |